Робот с 20 ногами и 20 глазами представляет собой «ошибку» в традиционной робототехнической концепции
📖 Источник статьи — 🇧🇷 ПортугальскийРобот может ускоряться и двигаться в разных направлениях без необходимости предварительного изменения положения, что необычно для традиционных моделей.
📰 📰 Похожие статьи
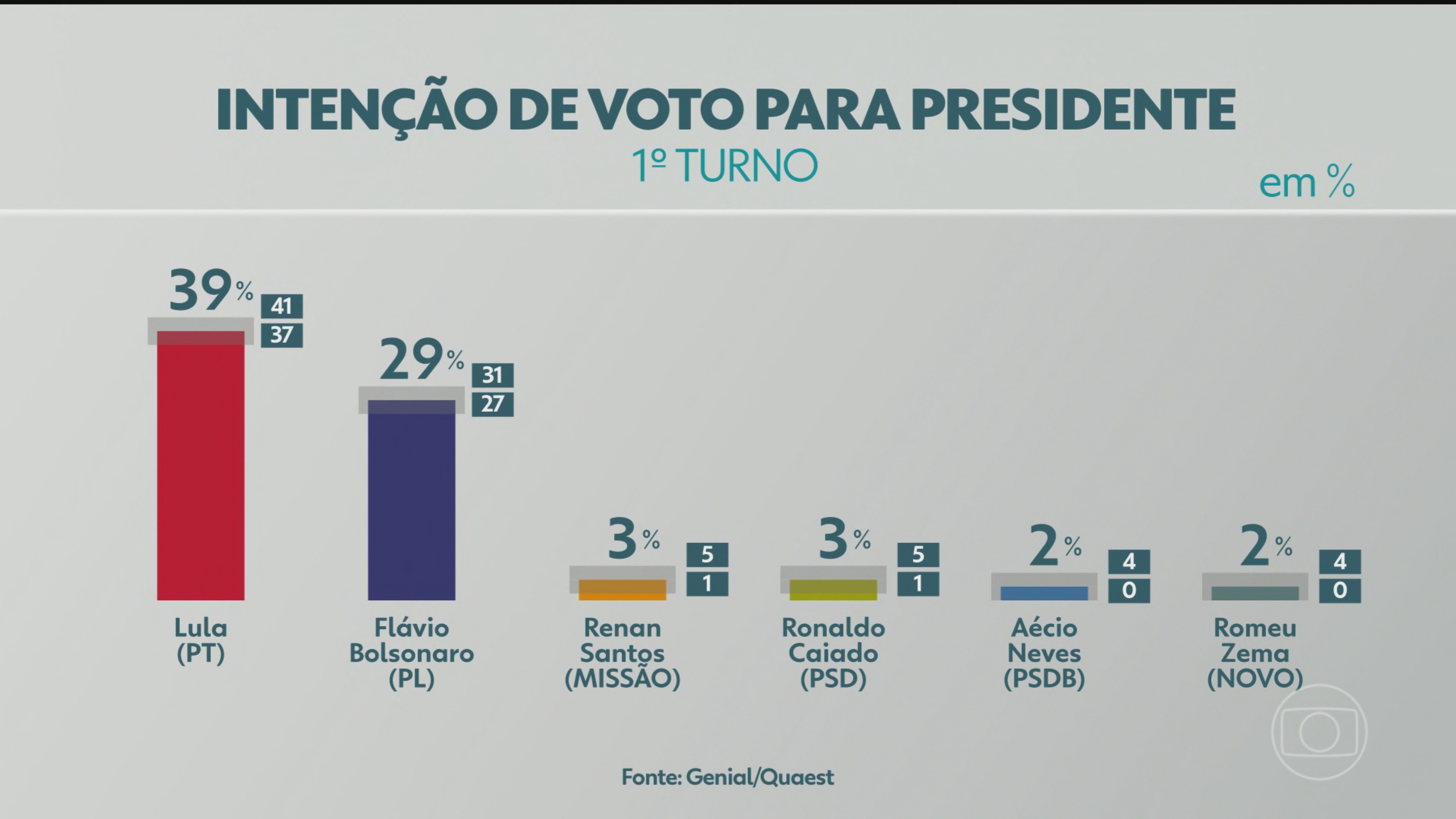
Квест 2-й тур: Лула имеет 44% намерений голосовать; Флавио Болсонару, 38%
G1 Globo
Супер Сет сегодня: результаты конкурса 858 и жеребьёвки
G1 Globo
Пожарные проехали более 100 км, чтобы помочь пожилым людям, заболевшим во внутренних районах Акры
G1 Globo
Engie одобряет предложение акций на приобретение части гидроэлектростанции Жирау
CNN Brasil
Автобус, украшенный цветами Капричосо и Гарантидо, переносит атмосферу фестиваля Паринтинс на улицы Манауса.
G1 Globo